<aside> 💡
ROS2 통신방식 : Topic, Service, Action
</aside>
import rclpy as rp
from rclpy.node import Node
from turtlesim.msg import Pose
class TurtlesimSubscriber(Node):
def __init__(self):
super().__init__('turtlesim_subscriber')
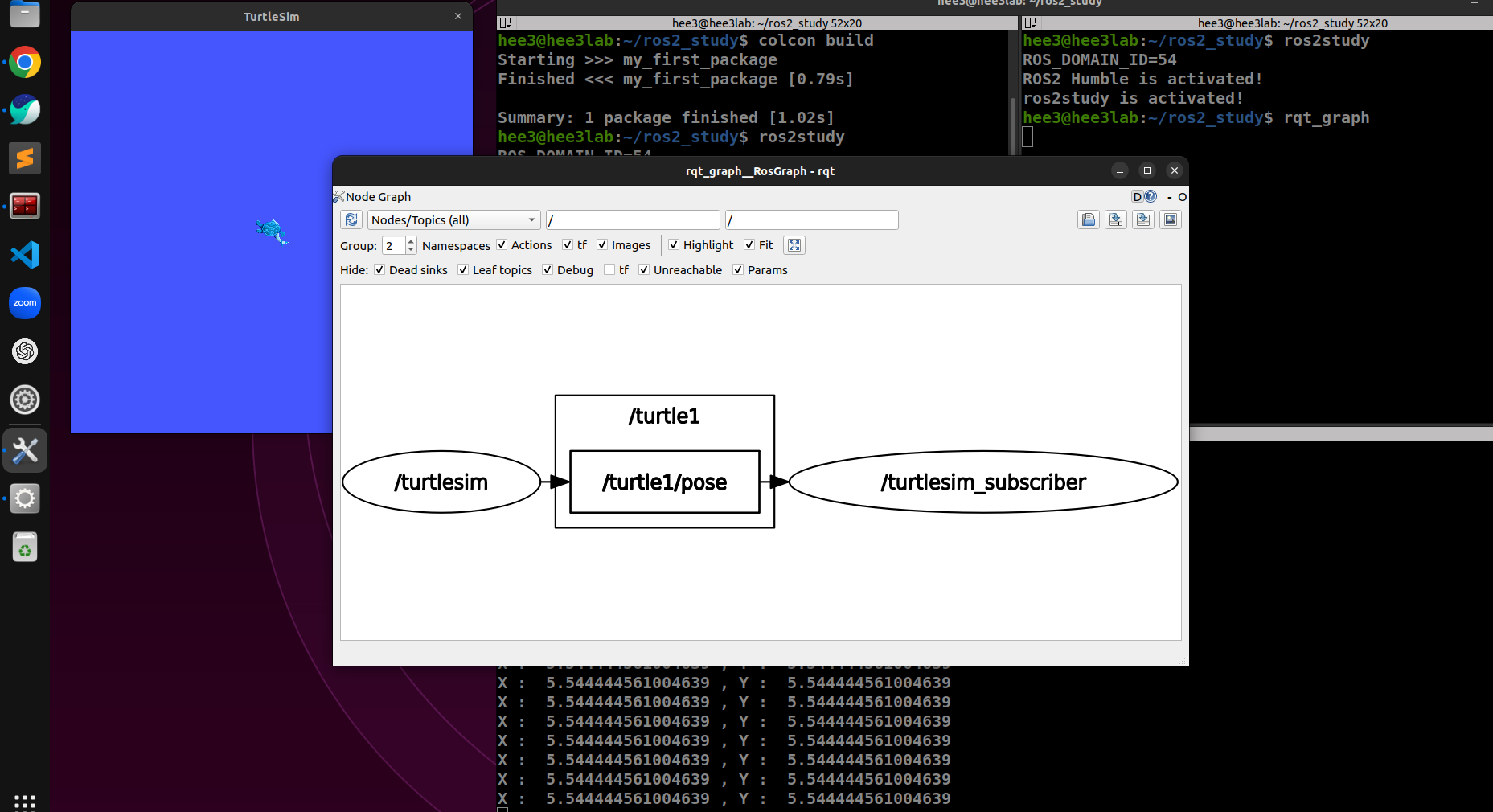
self.subscription = self.create_subscription(
Pose,
'/turtle1/pose',
self.callback,
10)
self.create_subscription # prevent unused variable warning
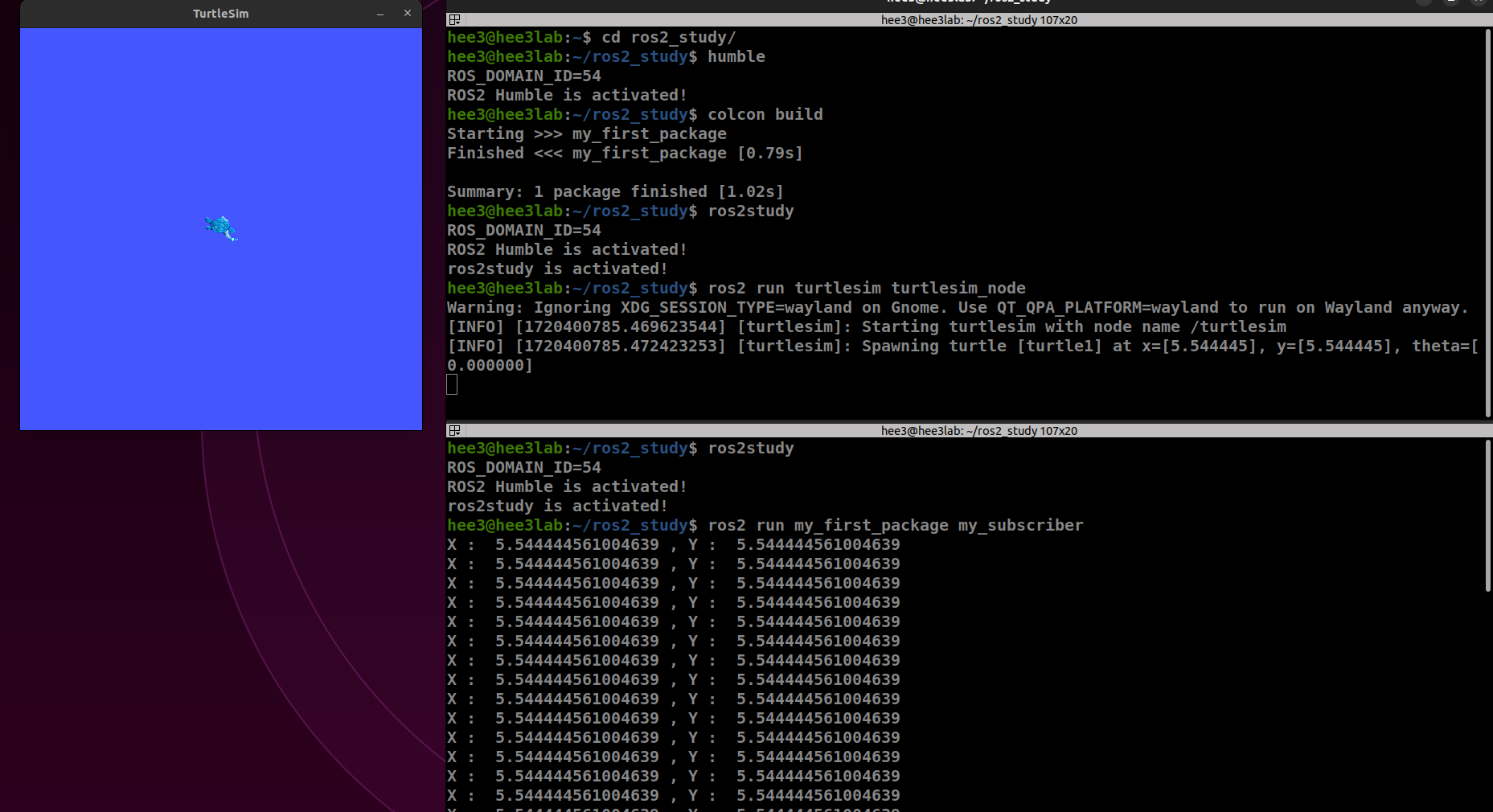
def callback(self, msg):
print("X : ", msg.x, ", Y : ", msg.y)
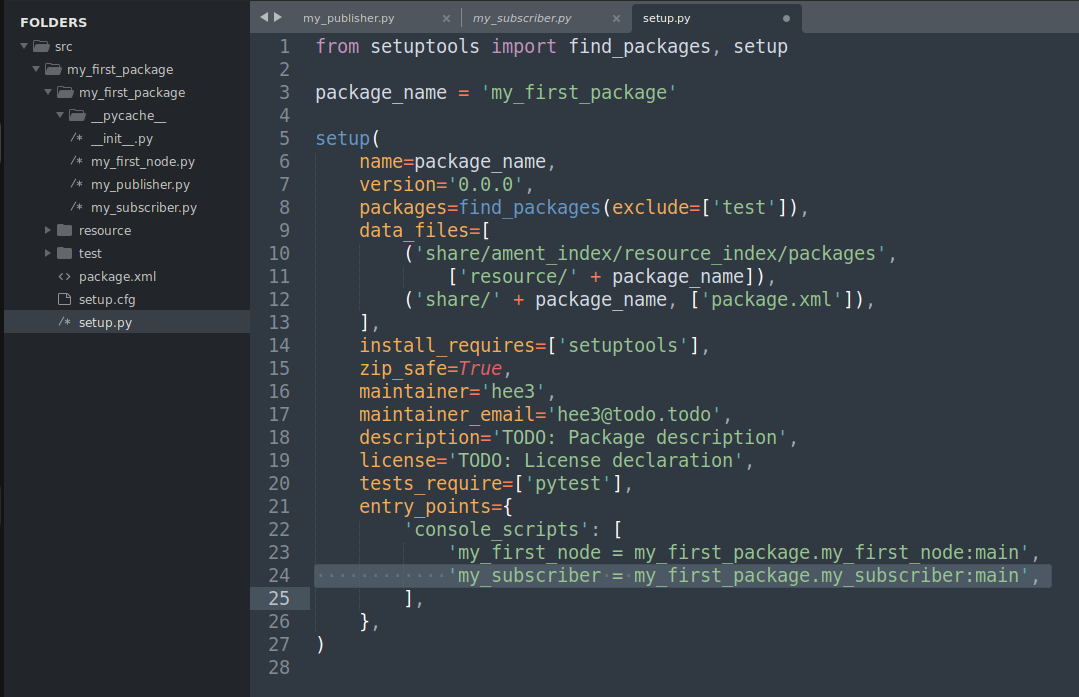
def main():
rp.init()
turtlesim_subscriber = TurtlesimSubscriber()
rp.spin(turtlesim_subscriber)
turtlesim_subscriber.destroy_node()
rp.shutdown()
if __name__ == '__main__':
main()
<aside> 💡
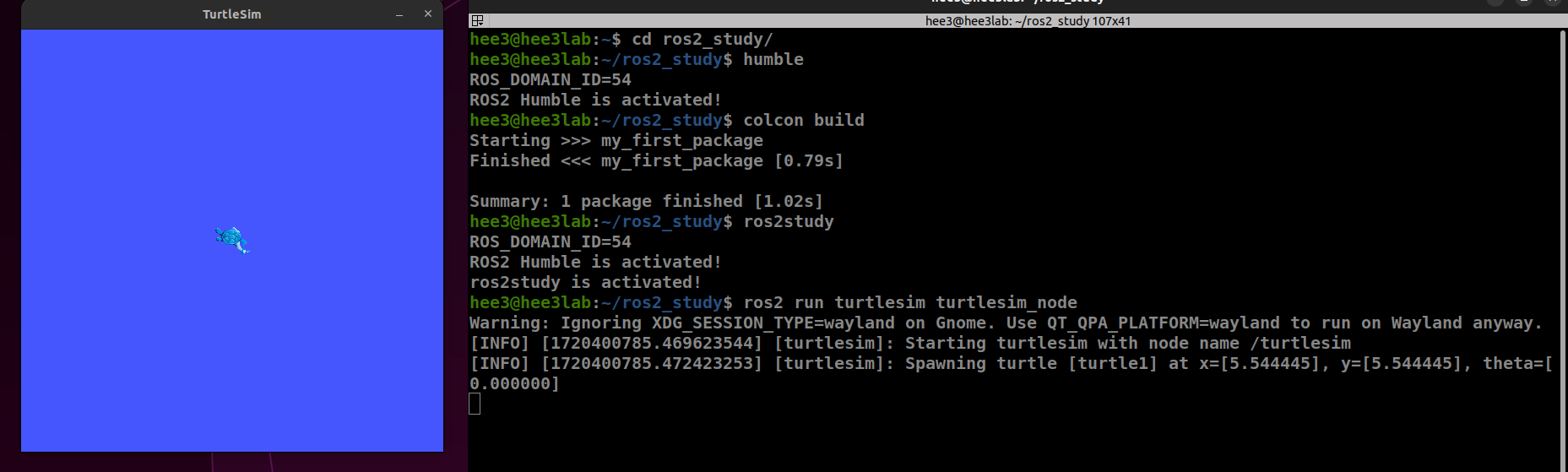
코드 추가 → 빌드 → 환경 읽기
</aside>