- OS : Ubuntu 22.04
- ROS 2 Humble
- Gazebo 11
<aside>
💡
토픽에서는 msg, 서비스에서는 서비스 정의
</aside>
1. 서비스 메세지 정의
1. srv 폴더 생성
- my_first_package_msgs에서 srv 폴더 생성
2. srv 파일 생성

- 데이터 데피니션 생성
- MultiSpawn.srv 이름으로 생성
- req와 res 구분 (구분자 사용, ---)
3. CMakeLists.txt 수정
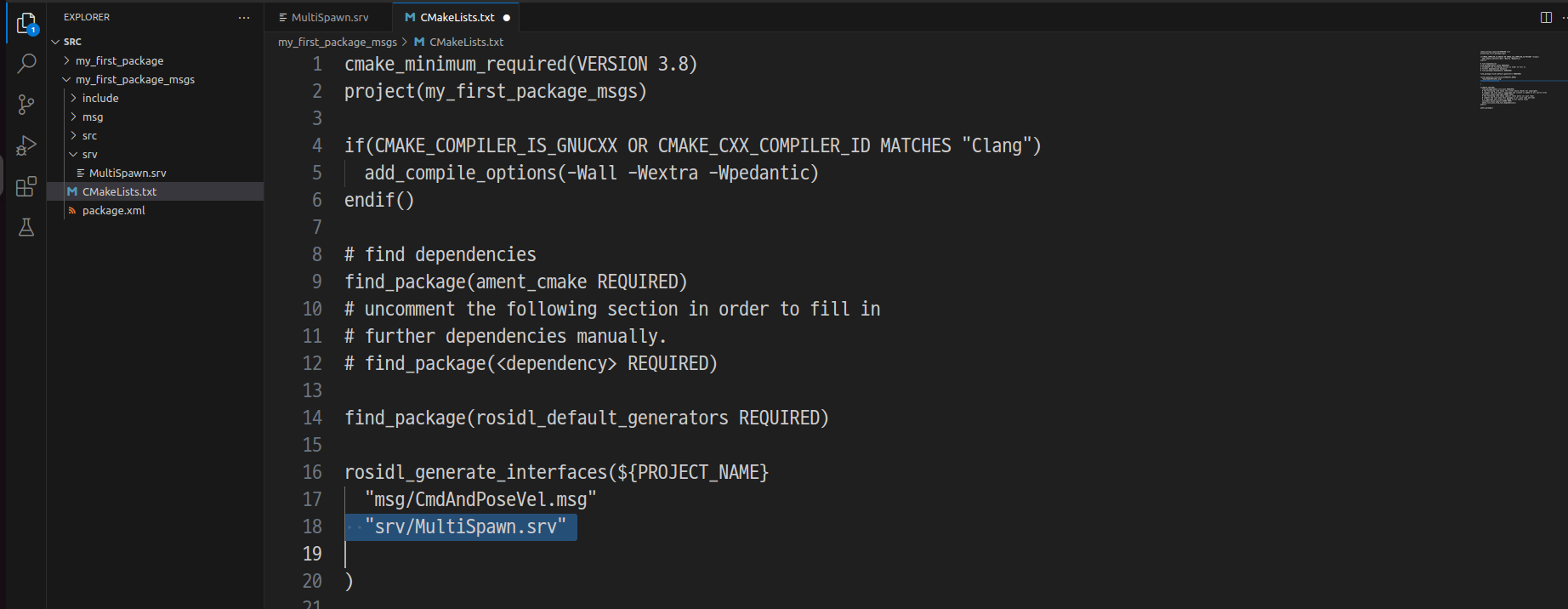
- srv 폴더에 MultiSpawn.srv파일이 있다고 CMakeList에 알려주기
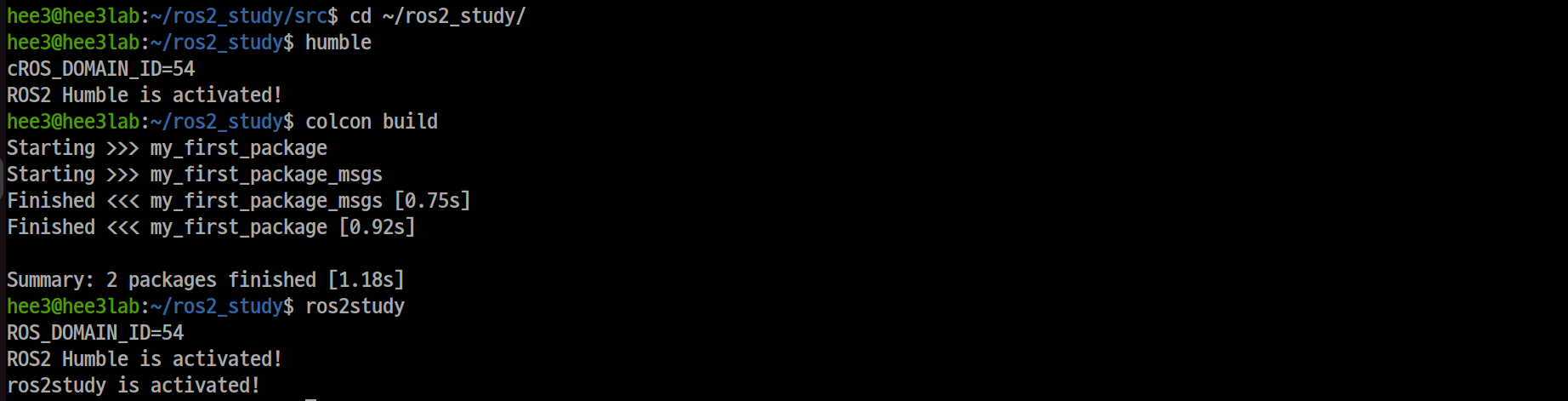
4. 빌드하고 환경 부르기
5. interface show 확인