OS : Ubuntu 22.04
ROS 2 Humble
Gazebo 11
1. 액션 서버 만들기
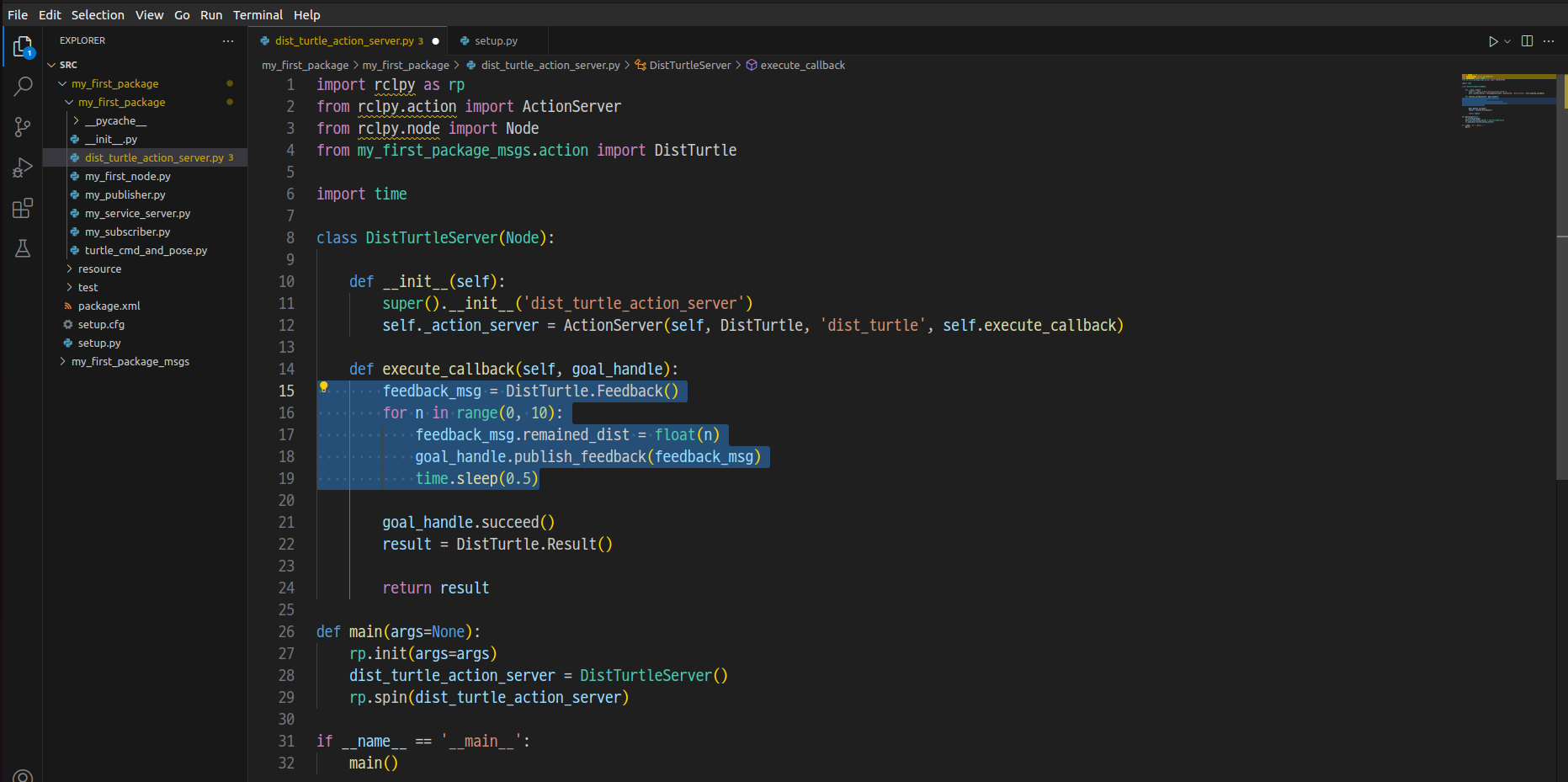
1. 코드 수정
callback함수에 피드백 받도록 수정 (피드백 구조만 확인)
0~9 반복문에서 float형으로 바꾸고 remained_dist에 추가
publish_feedback으로 피드백을 토픽으로 발행
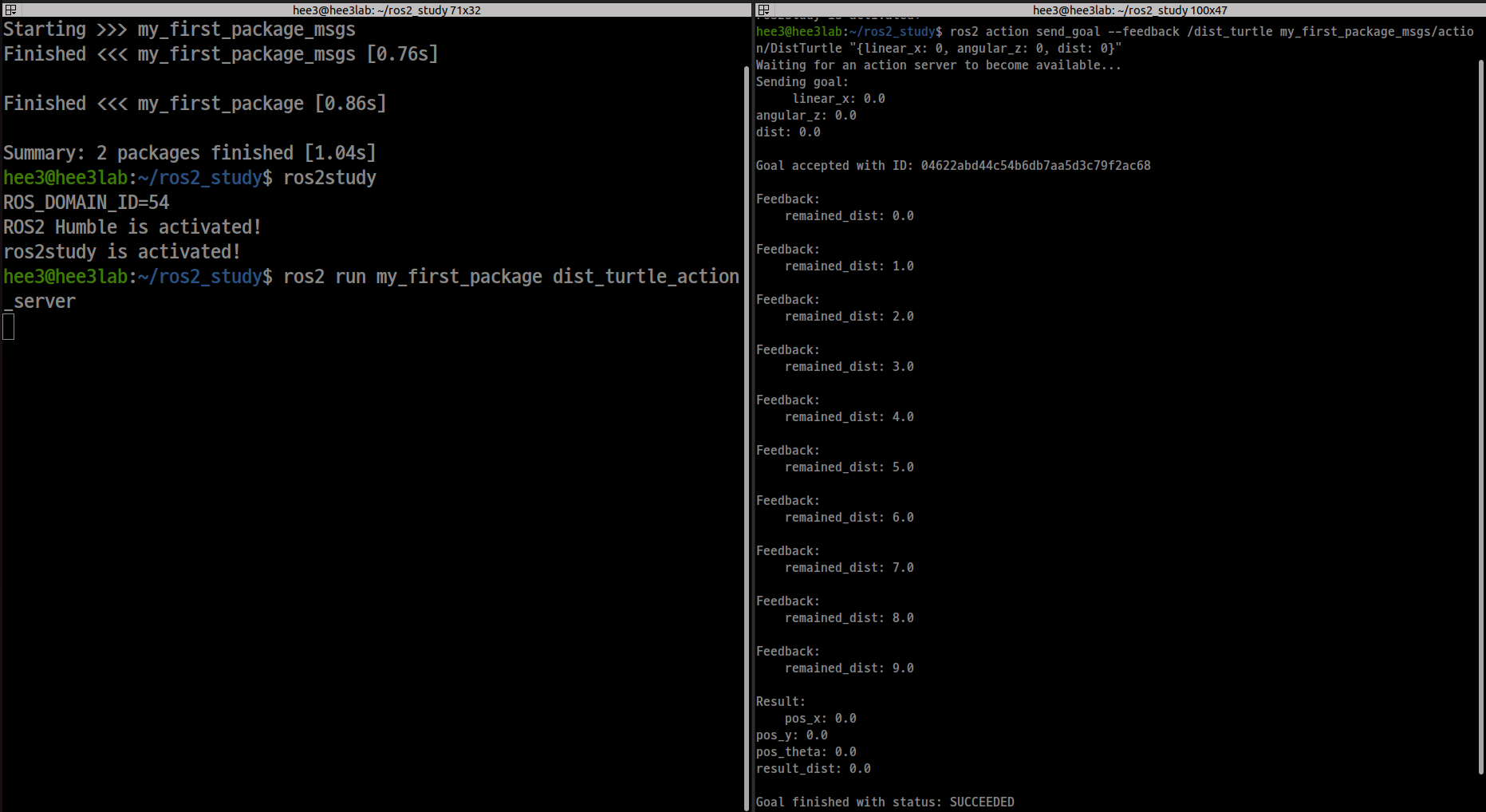
2. 빌드
3. 액션 서버 가동
send_goal 할 때 --feadback 옵션