- OS : Ubuntu 22.04
- ROS 2 Humble
- Gazebo 11
1. 저장한 거리만큼 거북이 보내기
1. 코드 수정
import rclpy as rp
from rclpy.action import ActionServer
from rclpy.executors import MultiThreadedExecutor
from rclpy.node import Node
import time
import math
from my_first_package_msgs.action import DistTurtle
from turtlesim.msg import Pose
from geometry_msgs.msg import Twist
from my_first_package.my_subscriber import TurtlesimSubscriber
class TurtleSub_Action(TurtlesimSubscriber):
def __init__(self):
super().__init__()
self.ac_server = ac_server
def callback(self, msg):
self.ac_server.current_pose = msg
class DistTurtleServer(Node):
def __init__(self):
super().__init__('dist_turtle_action_server')
self.total_dist - 0,0
self.is_first_time = True
self.current_pose = Pose()
self.previous_pose = Pose()
self.publisher = self.create_publisher(Twist, '/turtle1/cmd_vel', 10)
self._action_server = ActionServer(self, DistTurtle, 'dist_turtle', self.execute_callback)
def calc_diff_pose(self):
if self.is_first_time:
self.previous_pose.x = self.current_pose.x
self.previous_pose.y = self.current_pose.y
self.is_first_time = False
diff_pose = math.sqrt((self.current_pose.x - self.previous_pose.x)**2 + (self.current_pose.y - self.previous_pose.y)**2)
self.previous_pose = self.current_pose
return diff_pose
def execute_callback(self, goal_handle):
feedback_msg = DistTurtle.Feedback()
msg = Twist()
msg.linear.x = goal_handle.request.linear_x
msg.angular.z = goal_handle.request.angular_z
while True:
self.total_dist += self.calc_diff_pose()
feedback_msg.remained_dist = goal_handle.request.dist - self.total_dist
goal_handle.publish_feedback(feedback_msg)
self.publisher.publish(msg)
time.sleep(0.1)
if feedback_msg.remained_dist < 0.2:
break
goal_handle.succeed()
result = DistTurtle.Result()
result.pos_x = self.current_pose.x
result.pos_y = self.current_pose.y
result.pos_theta = self.current_pose.theta
result.result_dist = self.total_dist
self.total_dist = 0.0
self.is_first_time = True
return result
def main(args=None):
rp.init(args=args)
executor = MultiThreadedExecutor()
ac = DistTurtleServer()
sub = TurtleSub_Action(ac_server=ac)
executor.add_node(ac)
executor.add_node(sub)
try:
executor.spin()
finally:
executor.shutdown()
ac.destroy_node()
sub.destroy_node()
rp.shutdown()
if __name__ == '__main__':
main()
- Pose는 터틀심이 발행하는 Pose 토픽을 구독하려면 알아야하는 데이터 타입
- Twist는 cmd-vel 토픽이 사용하는 데이터 타입
- DistTurtle은 만드려고 하는 액션 서버가 사용하는 데이터 타입
- main 함수는 멀티쓰레드
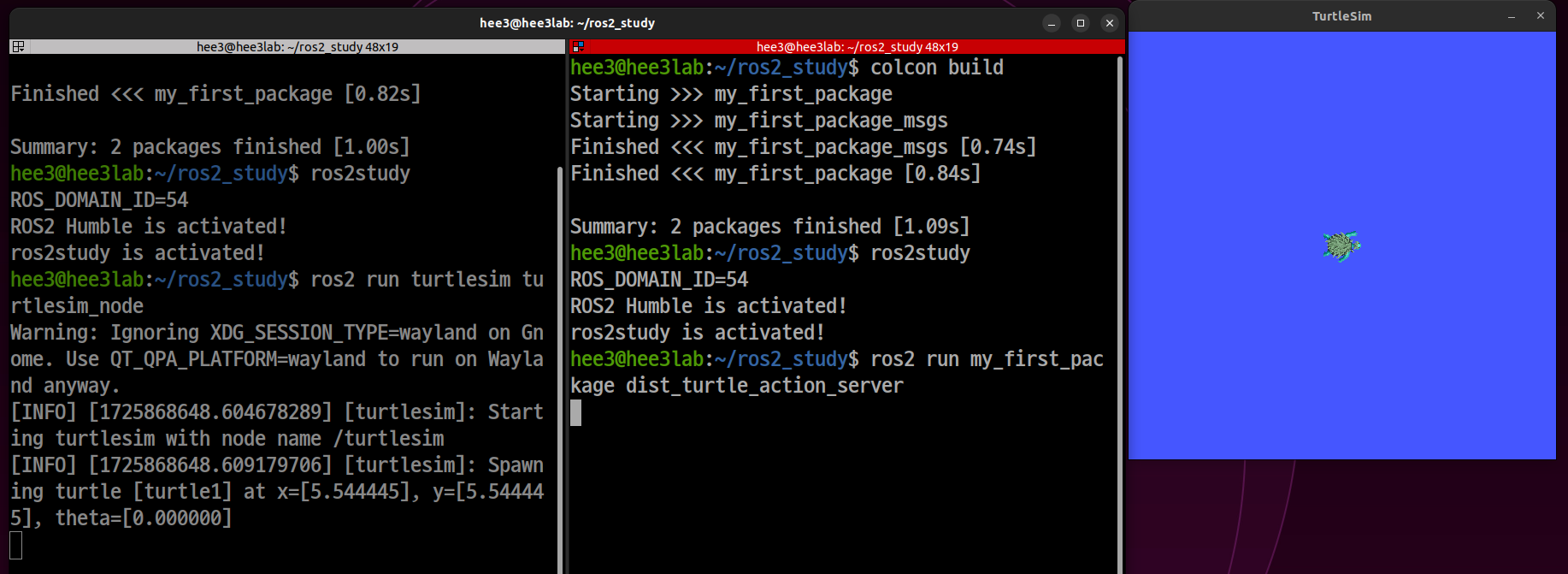
2. 빌드 후 환경 부르기
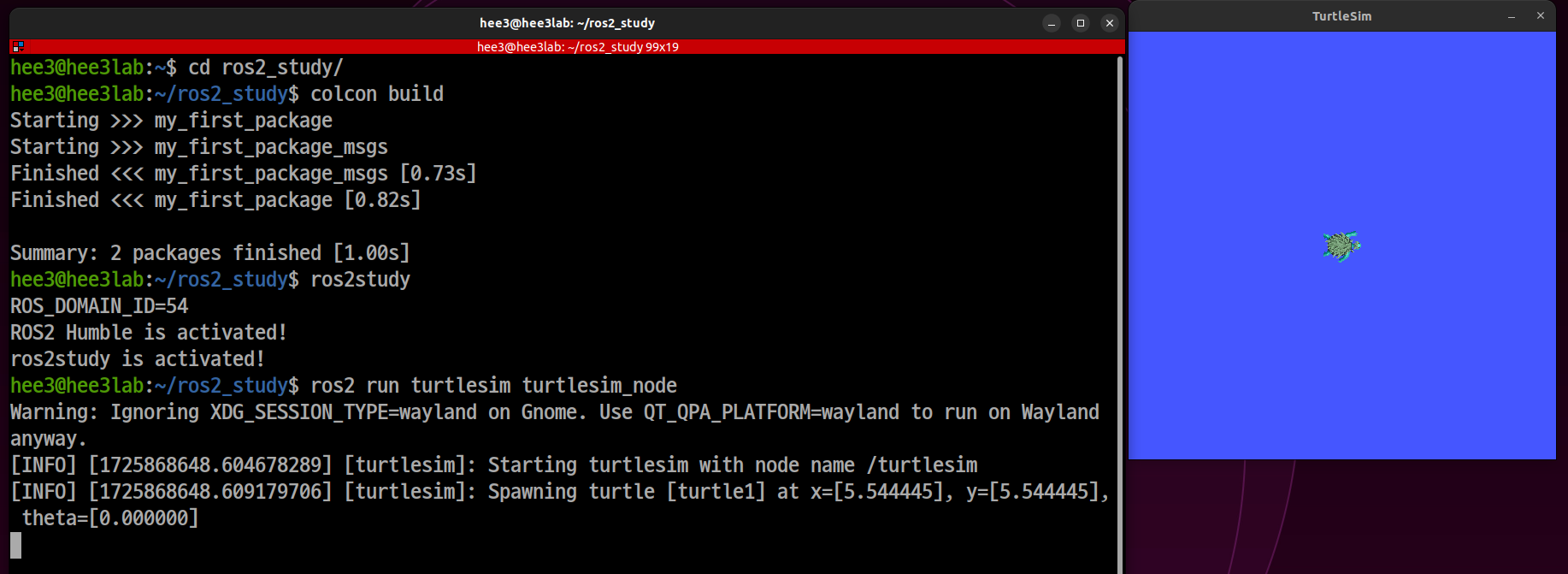
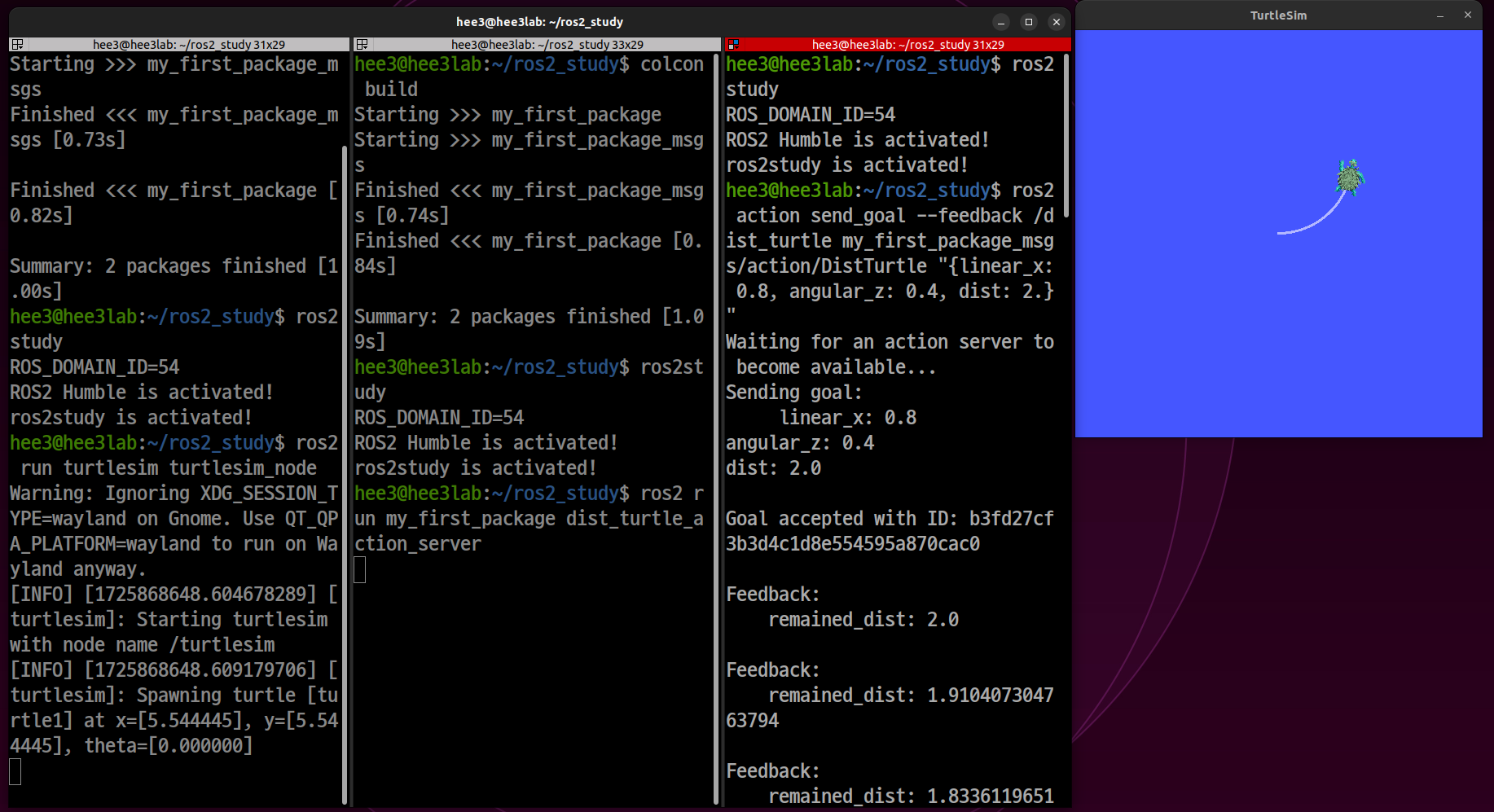
3. 액션 서버 실행
4. 액션 클라이언트 설정