OS : Ubuntu 22.04
ROS 2 Humble
Gazebo 11
1. 파라미터 다루기
1. 실험 환경 준비
bashrc에 지정된 alias 불러오기
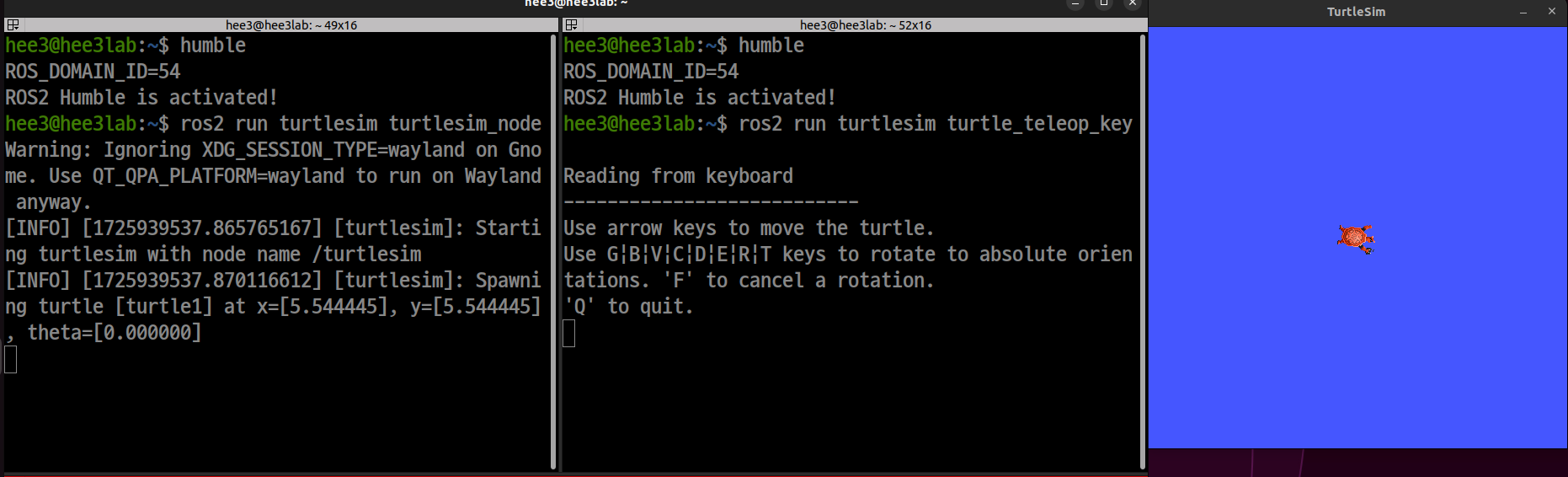
2. 거북이 소환
거북이 소환
turtle_teleop_key로 방향키로 움직일 준비
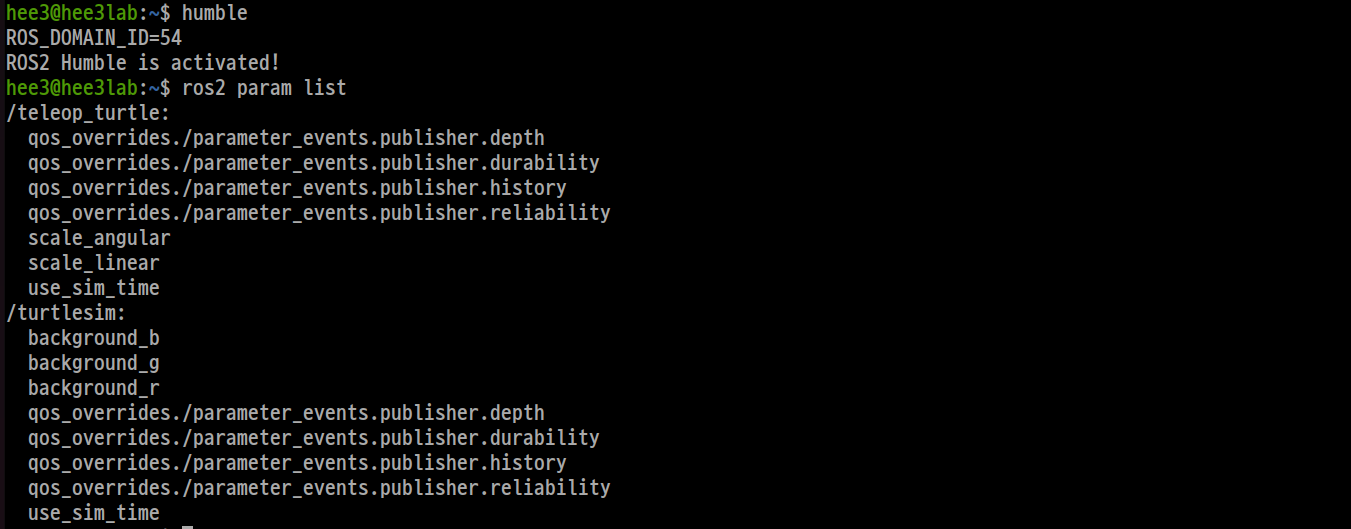
3. 파라미터 리스트
param list 확인 (파라미터)
4. 파라미터 값 조회
ros2 param get /turtlesim background_g
5. 파라미터 값 변경